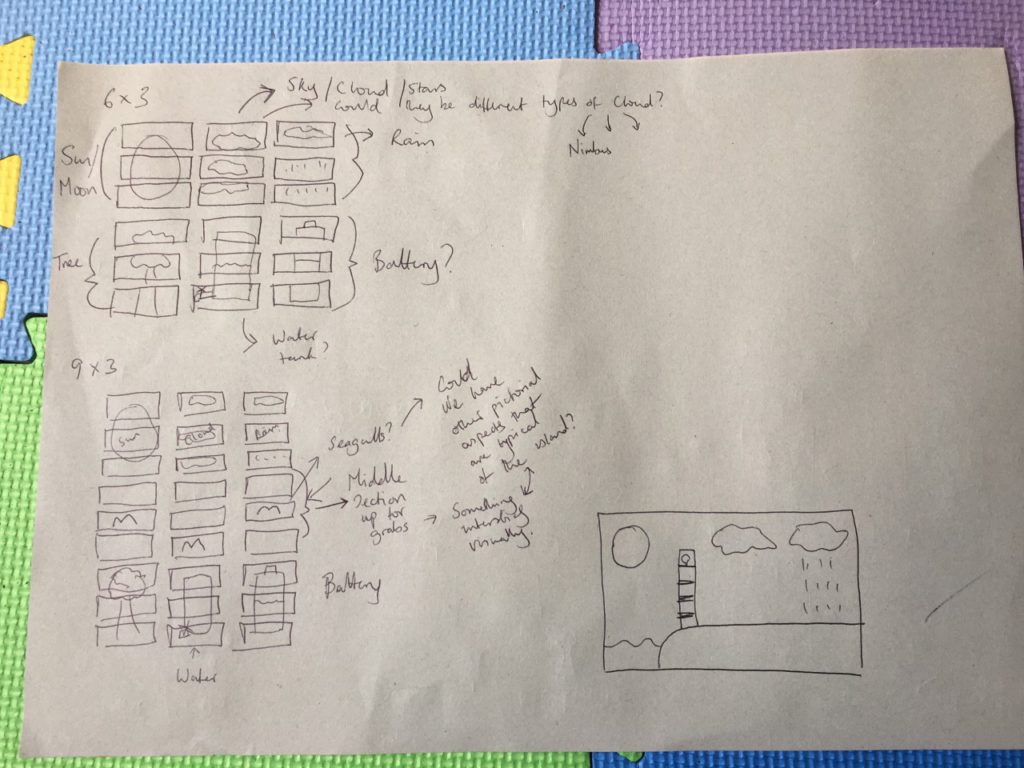
Last we we hit a brick wall. This week it seems like we are bulldozing through that wall. We have had some very interesting discussions which have really pushed our thinking from data right through to electronics and then to the aesthetic. On the table now is the possibility of having thirty-six servos and/ or motors. We are now thinking of a matrix of Toblerones. The fact that we can use motors (constant rotation) and servos (turn Toblerone to different side) has also opened things up for us. In addition to this, we realised that we don’t just have the three sides of the Toblerone to work with, we also have the constant rotation of these (see below and the rainfall)… another way to output/ present the data. Finally, we also have the possibility of using either and/ or a combination of cylindrical or Toblerone forms.




0 Comments